목적
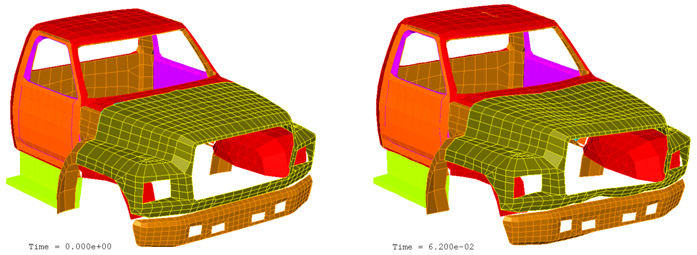
트럭이 방지턱을 통과 할 때 변형이 발생 할 것이라 예상되는 부분을 확인하는 것이 본 예제의 목적입니다. 또한 트럭 모델의 메인 파트에 플렉서블 바디를 적용하여 고유치 해석을 RADIOSS에서 진행하는 것입니다. 모델링 품질을 평가하기 위해서 강체가 적용된 모델과 플렉서블 파디가 적용된 모델을 비교해봅니다.
예제는 총 2편으로 본 편에서 다루는 내용은 다음과 같습니다.
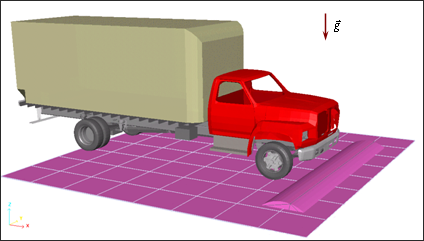
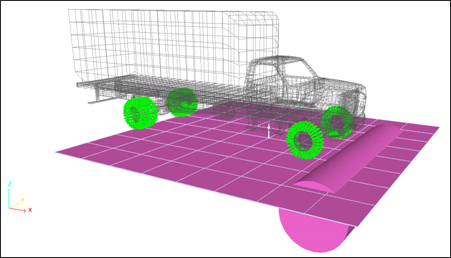
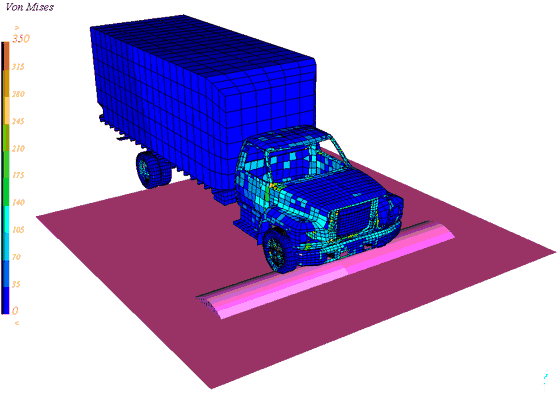
지면에 놓여있는 트럭 모델은 정적 평형상태가 되기 전까지 중력의 영향을 받고 평형상태가 시작되면 15.6m/s (56 km/h)의 초기 속도가 적용되어 트럭이 움직이게 되어 방지턱과 부딪히게 됩니다. 이와 같은 트럭 모델링에 대한 설명과 해석 결과를 확인하는 것이 본 예제의 목적입니다.
모델링
단위 : mm, s, ton, N, MPa
대부분의 파트에 적용되는 선형 탄성 물성 (/MAT/LAW1)
- •Young’s modulus: 205000 MPa
- •Poisson’s ratio: 0.3
- •Density: 7.85×10-9 Kg/l
빔과 스프링 요소의 물성 (/MAT/LAW2)
- Young’s modulus: 205000 MPa
- Poisson’s ratio: 0.3
- Density: 7.85×10-9 Kg/l
- Yield stress: 180 MPa
- Hardening parameter: 480 MPa
- Hardening exponent: 0.5
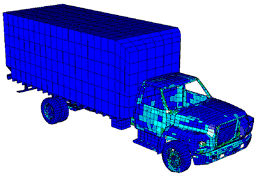
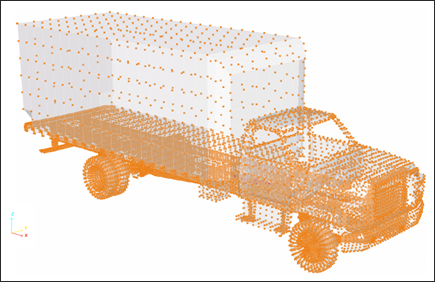
트럭 모델에는 총 21430개의 요소로 Mesh되었으며 총 148356개의 자유도를 갖고 있습니다. 1D 요소는 173개 2D는 20109개 그리고 3D는 1148개입니다.
좀 더 자세하게 보면 아래와 같이 요소들이 구성되어 있습니다.
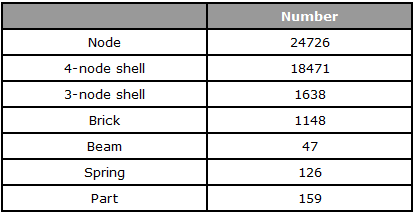
Explicit 계산을 위해 Belytschko (type 4, Ishell 4)가 사용되었습니다. 모드를 계산하기 위해서는 implicit 옵션이 필요하기 때문에 고유치 해석은 반드시 완전 적분 요소를 사용해야 합니다.
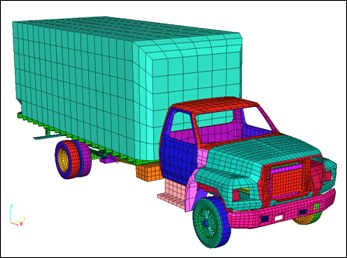
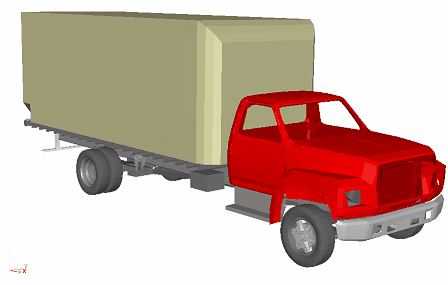
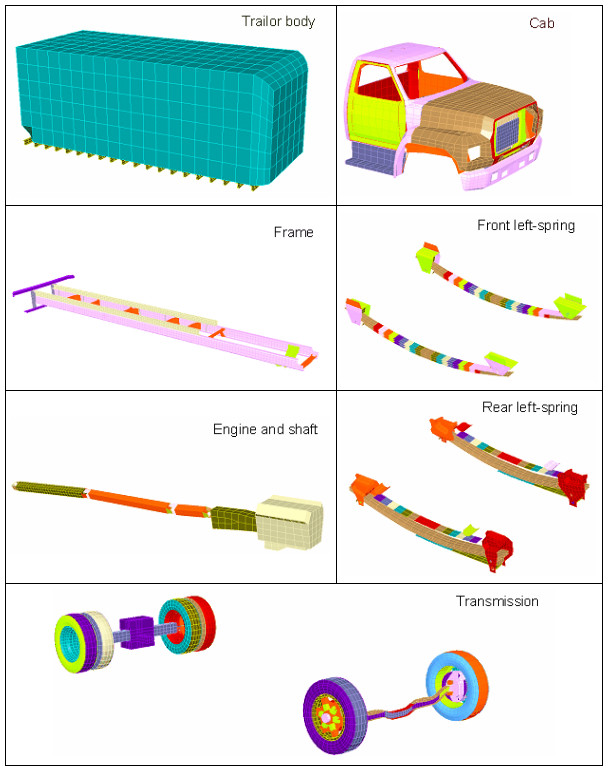
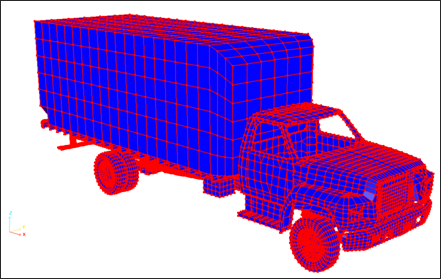
모델의 주요 파트들은 다음과 같습니다.
경계체적 / 이상기체
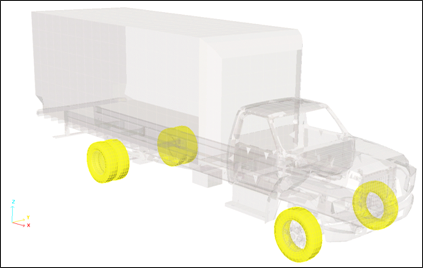
트럭의 타이어 내부 압을 모델링하기 위해 경계체적이 사용되었습니다. 경계체적은 하나 또는 다수의 쉘 특성이 적용되며 이들은 반드시 닫혀있는 상태여야 합니다. 주요 특성은 다음과 같습니다.
- External pressure: 0.1 MPa
- Initial internal pressure: 0.3 MPa
- Constant gas: 1.4
이들 외의 다른 모든 값들은 기본 값으로 설정되었습니다. 경계체적으로 모델링된 파트들은 아래 그림과 같습니다.
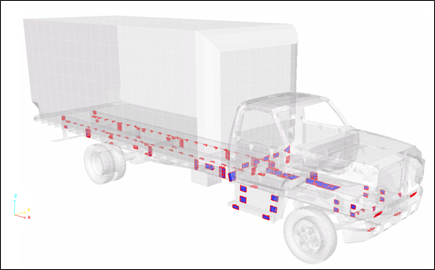
파트간 연결
파트들을 어셈블리 하기 위해서 4개의 링크 타입이 모델에 적용되었습니다.
- 빔 타입의 스프링 (Type 13)
- 강체 (kinematic condition)
- Tied 컨택 (kinematic condition)
- 절점 공유
빔 타입 스프링 요소는 용접점을 모델링 할 때 유용하게 사용됩니다. 본 예제에서 적용된 스프링 특성은 다음과 같습니다.
- Young’s modulus: 210000 MPa
- Inertia: 2×10-4 kg.m2
- Mass: 2×10-6 ton
하중과 모멘트는 인풋 커브로 부터 읽어들여지며 자세한 값들은 다음과 같습니다.
Table 2 : F-D 커브 (force – displacement)

Table 3 : M-R 커브 (moment – rotation)

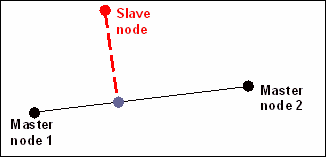
Tied 컨택을 위한 Interface type 2로 마스터 면과 슬레이브 절점들을 하나의 셋으로 연결하게 되는데 슬레이브 절점에 kinematic 구속이 설정되었으며 각 절점들은 그들의 마스터 세그먼트와 동일한 위치에 있게 됩니다. 위와 같은 내용이 적용된 접촉 조건을 kinematic condition이라 합니다. Spot_flag는 점용접 계산법은 0으로 설정되어있으며 공유되는 절점이 없이 요소를 연결시켜주는 역할을 합니다. 마스터 면은 반드시 mesh와 동일한 위상에 있어야 합니다.
강체는 두개 혹은 더 많은 파트들을 연결하기 위해 사용되며 이러한 강체들에 추가적인 질량은 부여되지 않았습니다. 또한 마스터 절점들은 어디에도 위치 할 수 있습니다. 이때 슬레이브 절점들은 다른 kinematic condition을 적용해선 안됩니다. (예를 들어 tied 컨택 같은)
구형 관성은 강체를 사용하기 위해서 반드시 적용해야 합니다. 강체는 단지 2개의 슬레이브 절점만을 갖고 있기 때문에 요소의 안정성을 위해서 구형 관성(Ispher = 1)이 적용되야 합니다. 이처럼 관성은 구형이며 데이터로부터 계산되지 않습니다.
접촉조건 모델링 – 셀프 컨택
파트간의 셀프 접촉을 고려하기 위해서 type7이 사용되야 합니다. 접촉 갭은 0.5mm입니다.
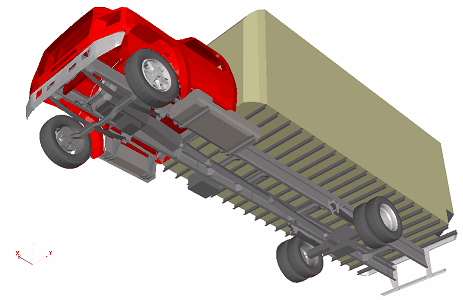
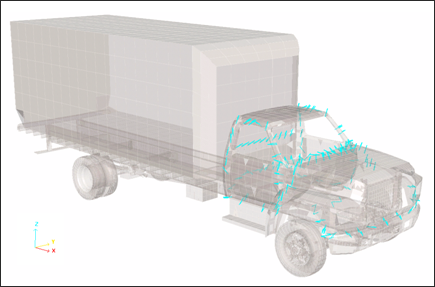
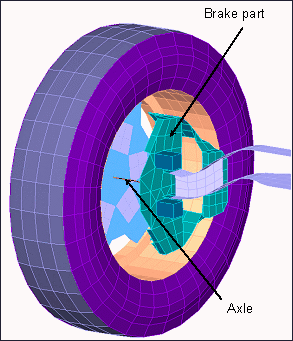
휠 회전 모델링
휠은 자축(Axle)을 사용해서 브레이크 시스템과 연결되어 있습니다. 빔 요소(반대측의 빨간 부분)는 자축(axle)을 모델링하며 회전 방향의 구속이 풀려있는 상태입니다.
RADIOSS 옵션
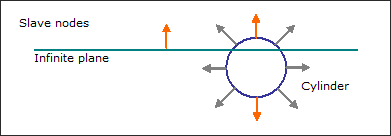
– 무한 평면 (지면)
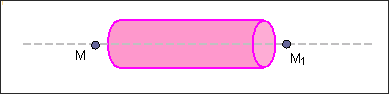
– 무한 원통 (방지턱) , 지름은 1500mm
실린더형 벽은 아래와 같이 모델링되어있으며 M과 M1의 좌표는 다음과 같습니다.
M(500, 0, -600), M1(500, 100, -600)
두 강벽 (지면, 방지턱) 은 휠이 돌아 갈 수 있도록 연결되어있습니다. 타이어 파트는 무한 평면에 대해 슬레이브 절점들로 정의되어 있고 전면 우측 타이어의 절점들만이 방지턱 강벽의 슬레이브로 설정되어 있습니다. kinematic condition은 충격을 받는 각각의 슬레이브 절점에 적용되었으며, 이 때문에 슬레이브 절점들은 그러한 조건들이 직교방향으로 적용되어있지 않는 경우에는 다른 kinematic condition을 적용 할 수 없습니다. 가령 manner, incompatible kinematic condition들을 실린더와 평면의 Z축을 따라서 수직 방향과 일치 할 때 발견 할 수 있습니다. 그러나 공통의 슬레이브 절점들은 두개의 kinematic condition의 영향을 받진 않습니다.
15600 mm.s-1 (56km/h)의 초기 속도는 구조물의 모든 절점에 X방향으로 시간이 0.3초가 되었을 때 적용됩니다. 이 같은 초기 조건은 D02에 (리스타트파일 *_0002.rad) 적용되었으며 시간을 0.3으로 설정한 이유는 중력에 의한 준 정적 평형 상태가 된 후에 적용하기 위함입니다.
*_0002.rad 파일에 쓰인 옵션을 살펴보면 다음과 같습니다.
- /INIV/TRA/X/1 : X축 방향의 초기 회전 속도
- 15600 : 15600 mm/s
- 1 265130 : 절점 1 ~ 265130 (/INIV/TRA/X/1)
준정적 하중 : 초기 정적 평형상태에서의 중력의 영향
준정적해석에서 구조물 변형에 대한 중력 하중은 동적 응답의 정적 상태와 transient 해석 전의 pre-loading을 묘사하는 것입니다. 이와 같이 시뮬레이션 상태에서는 2가지 단계로 구분합니다. 준정적상태 (중력의 영향), 동적 거동 (방지턱에 충돌하는 구조물)
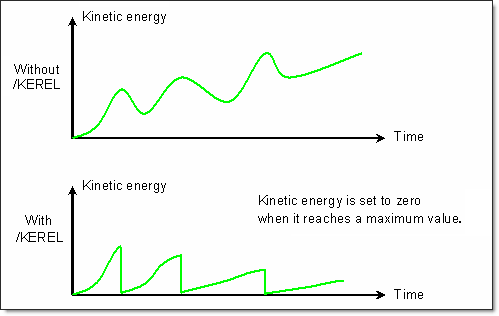
중력은 모델에 존재하는 전체 절점에 -9810 mms-2로 균일하게 Z방향으로 정의되며, 중력을 활성화 시키는 키워드는 /GRAV입니다. explicit 시간 적분 방식은 절점의 가속도 계산 시작으로 가정합니다. 동적 하중에 대한 시뮬레이션에서는 매우 효율적인 방법입니다. 그럼에도 불구하고 동적 해결 방법을 이용한 준정적 시뮬레이션은 평형 상태를 향해 수렴하기 위해 동적 영향을 최소화 시킬 필요가 있습니다. 여러가지 적용된 방법들 중에서, kinetic relaxation 방법이 가장 효율적이며 이에 대한 옵션은 엔진 파일 (*_0001.rad)에 적용되어있습니다. (/KEREL) 운동에너지가 최대로 도달 할 때 이 옵션이 운동에너지를 0으로 적용시켜줍니다. (아래 그림 참조)
해석 결과 및 결론
1편에 대한 내용은 여기서 마치며 고유치 해석과 플렉서블 바디 등에 대한 내용은 14.2에서 좀 더 자세히 다루도록 하겠습니다.
끝.
공략 14.2편 – 14.2 – VPG with Flexible and Rigid Bodies
|
<-- 이전 글 보기
|
다음 글 보기 –>
|