목적
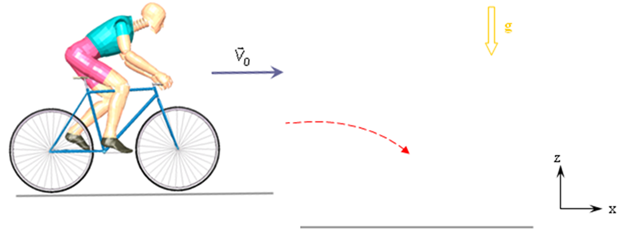
본 예제는 센서와 리스타트 파일을 사용하는 것이 주 목적입니다. 사용되는 예제 모델은 간단한 더미가 추가된 자전거의 운동이며 모델은 중력, 병진 이동, 점프, 충격과 같이 총 4단계의 경계 조건을 거치게 됩니다. 위의 과정을 거치는 동안 발생하는 결과들은 설정한 센서를 통해서 확인하게 됩니다.

모델 개요
중력 영역에서 맨 처음 더미는 높은 평지를 달리고, 그 다음 낮은 평지로 점프를 하게 됩니다. 이 과정은 총 4단계로 구분 할 수 있습니다.
– 중력의 영향을 받는 상태
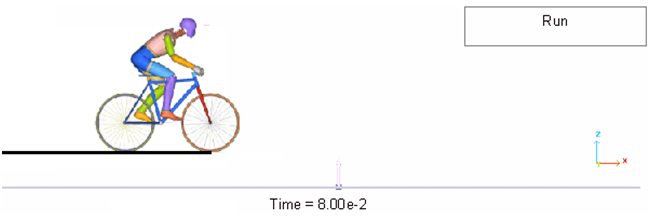
– 높은 평지를 달리는 상태
– 자유 낙하
– 낮은 평지에 닿을때 발생하는 충격

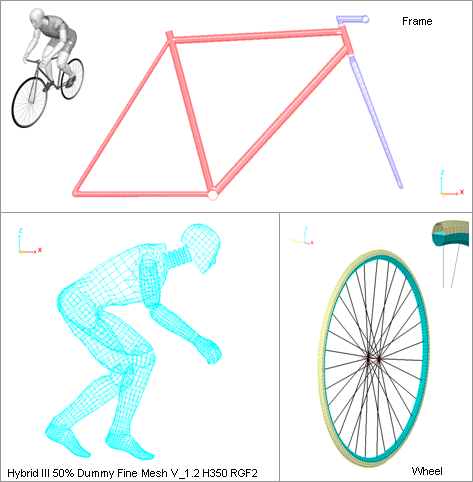
자전거는 총 12103개의 4node shell(quad)와 68개의 3node shell(tria) 그리고 12개의 beam, 6개의 brick 요소로 구성되어 있습니다. 더미는 4779개의 quad, 207개의 tria와 27개의 스프링 요소로 모델링 되어있습니다.
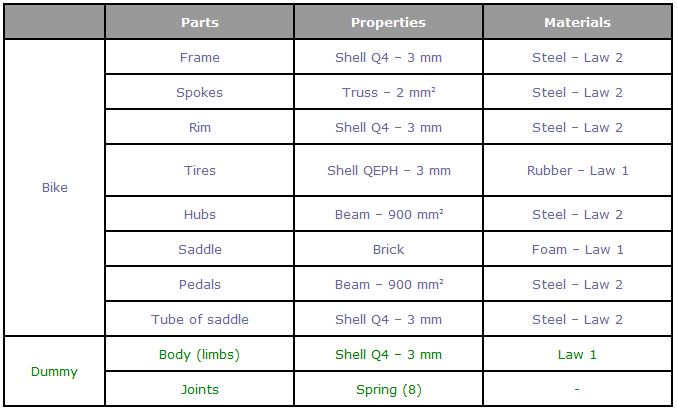
물성 정보 (Material)
사용된 물성은 다음과 같으며 자전거 타이어 부의 hourglass 변형을 예방하기 위해 QEPH(Ishell = 24)를 사용했습니다. 다른 나머지 부분에는 BT를 사용했습니다.
단위 : mm, s, ton, N, MPa
- Young’s modulus: 210000 MPa
- Poisson’s ratio: 0.3
- Density: 7.9×10-9 GKg/l
- Yield stress: 185.4 MPa
- Hardening parameter: 540 MPa
- Hardening exponent: 0.32
자전거 모델 : 6개의 큰 파트(subset)에 총 23개의 작은 파트(component)로 구성
더미 모델 : 11개의 큰 파트(subset)에 총 38개의 작은 파트(component)로 구성
아래 표는 위에 언급된 내용을 정리한 것입니다.
검사체적 / 이상기체
자전거 타이어의 압력은 이상기체의 검사체적으로 정의되어야 합니다. RADIOSS에서 다루는 검사체적에 대한 이론적인 내용은 Theory Manual을 참조하시기 바랍니다.
주요 특성은 다음과 같습니다.
- External Pressure (외부 압력) : 0.1MPa
- Initial Internal Pressure (초기 내부 압력) : 0.75MPa
- Gas Constant (기체 상수) : 1.4
그 외 다른 값들은 기본 값으로 설정했습니다.
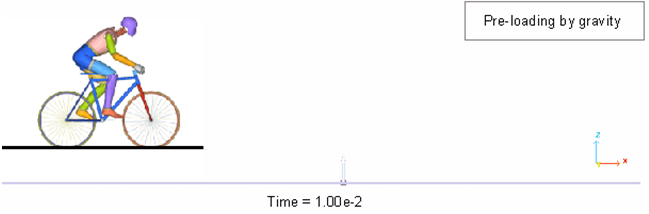
Quasi-static loading(준-정적 하중) : 초기 정적 평형 상태를 위해 중력을 부여
중력 하중에 의한 모델의 처짐, 안정화 때문에 동해석 이전에 적용을 시켜주게 되고 이는 준정적 상태, 동적 상태 2가지로 구분 할 수 있습니다. 해석에서 동적 완화 (kinetic relaxation)은 /KEREL카드로 중력은 /GRAV가 사용됩니다.
Contacts (접촉 조건)
페널티 메소드를 사용하는 컨택 Type7으로 더미와 자전거 간 접촉조건을 정의했습니다. 자전거가 낮은 지면에 닿을 때 셀프-접촉 조건이 정의되어져야 하기에 마찬가지로 Type7을 사용하여 정의내렸습니다. 아래 그림을 통해 정의된 접촉 조건을 확인 할 수 있습니다.
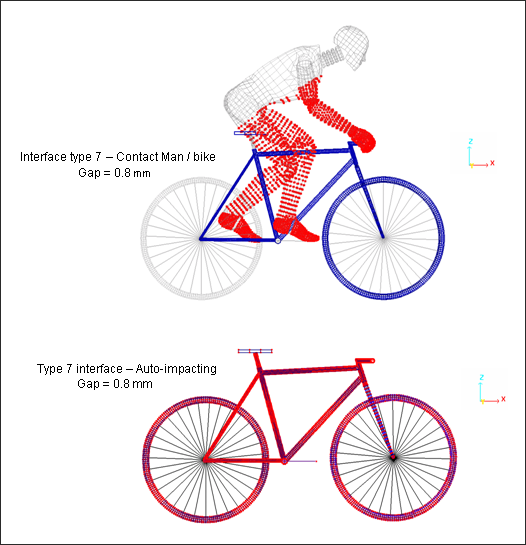
더미(shells)와 자전거 손잡이(beams)의 접촉 조건을 위해 Type11이 사용됐습니다.
스프링 Prop 8(/PROP/SPR_GENE)은 일반적인 스프링 요소의 특성을 정의하는 카드입니다. 본 모델에서는 발과 페달, 손과 핸들의 연결을 위해 사용되었습니다. 주요 물성 값은 아래와 같습니다.
- Stiffness (TX, TY, TZ) : 100kN/m
- Mass : 1g
- Inertia : 0.1 kg/mm^2
착지 후에 사이클 선수의 거동을 시뮬레이션 하기 위해서 손과 핸들을 연결한 빔 요소에 변위에 따른 파손 옵션을 정의했으며 그 값은 아래와 같습니다.
- Left hand : Z = 20mm
- Right hand : Z = 20mm
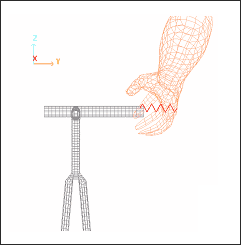
(손과 핸들을 연결한 스프링 요소)

(더미에 연결된 조인트, 스프링 요소)
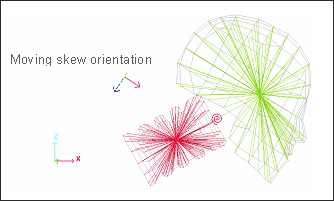
일반적으로 스프링 요소를 위한 Property 8번은 각각의 자유도에 강성을 부여해주는 힌지와 같은 형태를 구현하기 위해 사용됩니다.
스프링의 방향은 국부적이며 moving skew frame에 연결되어 있습니다. 아래 그림에 보이는 것처럼 Rigid의 slave node를 통해서 스프링 요소와 더미의 팔다리가 연결되어 있습니다.
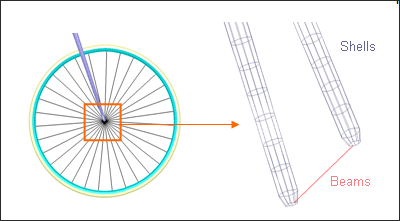
빔 요소는 휠과 프레임을 연결하기 위해 사용됐으며 빔 요소의 회전 방향의 강성은 풀어진 상태입니다.
평지를 표현하기 위해 2가지 Rigid Wall이 사용됐습니다.
- 무한 평면 (floor)
- 평행 사변형 (springboard)
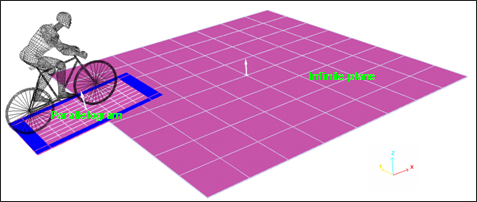
스프링보드의 크기는 2013 mm x 1200 mm입니다.
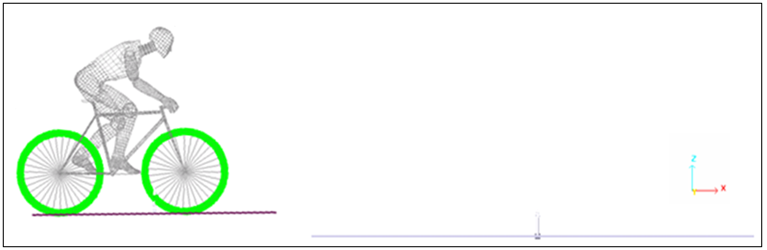
무한 평면은 평행사변형의 세 끝 (M, M1, M2)의 좌표와 수직한 벡터 방향으로 정의되었습니다. 두 Rigid Wall에 대해서 slave node들은 타이어와 림 파트로 부터 정의 되었습니다. (아래 그림의 녹색 부분 참조)
여러 부분에 강체를 생성했으며, 적절한 시간에 순차적으로 발생 할 수 있도록 설정했으며, 이처럼 모든 강체가 동시에 활성화 되는 것은 아닙니다. 활성화된 순서에 따르면 강체는 아래 테이블과 같이 분류 될 수 있습니다. (요약하자면 강체[rigid body]가 되는 순서가 각각 다르며 항상 강체로 설정되는 것은 아닙니다.)
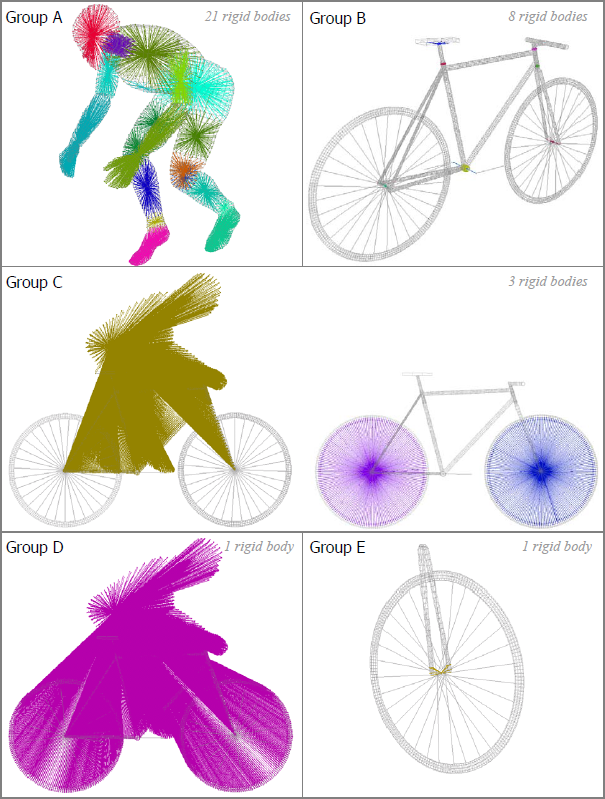
강체들의 관성은 국부적인 skew frame안에 셋업되었으며 그룹 A, C, D에 적용 됩니다.
강체 모드(Rigid body) 활성화 – 비활성화
Group A, B : 강체는 평형상태에 이르기 위한 하중(pre-loading) 적용되는 동안 활성화되며 초기 속력으로 적용됩니다. 자전거가 낮은 평면에 충격되기 전에 강체 모드는 다시 활성화 됩니다.
Group C : 3개의 강체가 더미속에 포함되어 있으며, 프레임과 휠(타이어를 제외한)이 강체입니다. 이들은 휠이 회전 할 수 있게 해주며 타이어와 평면간의 상호작용을 고려합니다. 자전거가 스프링보드를 달리는 동안 강체 모드가 작용합니다.
Group D : 글로벌 강체로 자전거가 자유 낙하하는 동안 활성화되며, 모델의 모든 노드들을 포함하여 적용됩니다. 이는 낮은 평지에 착지 하기 전에 비활성화됩니다.
Group E : 자전거 포크부의 충격이 발생하기 전에 강체모드가 활성화 됩니다.
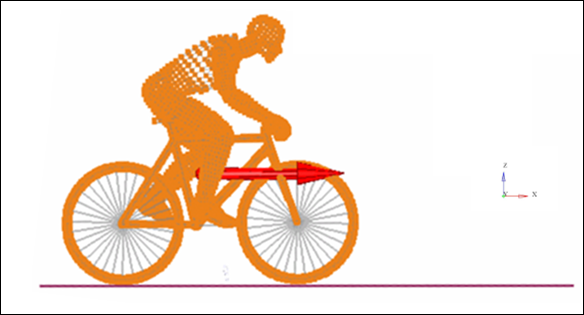
8333 mm/s (30km/h)의 초기 속도가 자전거와 더미 모델의 전체 모드에 적용됩니다. (0.004초부터 적용) 이 같은 초기 조건은 *_0002.rad 파일에 적용되어 있으며 중력에 의한 준정적 평형상태 이후에 적용되는 것입니다.
중력 -> 0.004초 대기 -> 초기속도(30km/h)
*_0002.rad (engine file) 옵션 정보
/INIV/TRA/X/1 -> 초기 X축방향 회전 속도
8333 -> 8333 mm/s 속도
1 338000 -> 노드 1에서 338000번까지
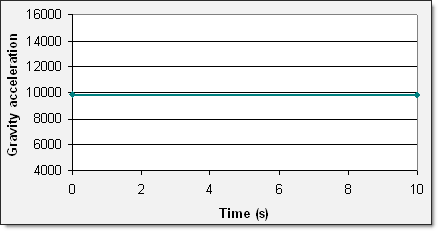
중력은 모든 노드에 적용되며, Z축 방향으로 9810mm/s^2로 일관되게 적용됩니다.
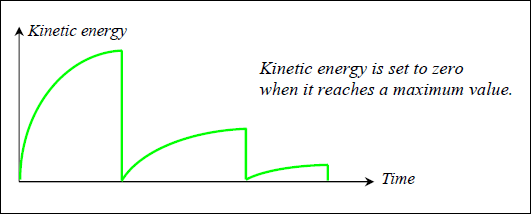
explict 시간 적분 방법은 노드의 가속도 계산에서 시작하는데 이러한 방법은 동적 하중의 시뮬레이션에 효율적입니다. 그럼에도 불구하고 동적 재해석 기법을 통한 준-정적 시뮬레이션은 동적 영향은 정적 평형상태의 수렴하기 최소화 시킬 필요가 있습니다. 일반적으로 사용되어지는 이러한 방법들 중에서 kinetic relaxation 기법(/KEREL)은 상당히 효율적이며 이를 *_0001.rad 파일에 적용했습니다. 운동에너지가 최대가 되는 점에서 속도는 모두 0으로 설정했습니다.
강체들은 센서와 함께 활성화되거나 비활성화됩니다. sens_ID (센서 ID)는 센서를 정의하는데 사용되며, 모델에는 아래 5개의 센서가 적용됩니다.
- TIME (activated with time)
- DIST (actived with nodal distance)
- INTER (actived with impact on rigid wall)
- SENSOR (actived with sensor IS1 and deactivated with sensor IS2)
- NOT (ON as long as sensor IS1 is OFF)

시뮬레이션의 시작점 (시간 = 0)에서 강체모드는 센서가 활성화되지 않는 한 자동적으로 활성화됩니다. 이처럼 첫 단계에서 강체 모드를 비활성화 시키기 위해, 시간이 0일때 센서의 활성화가 사용되어야 하며 센서가 활성화 되지 않았을 때 계속해서 강체 모드가 적용 될 것입니다. 즉, 센서가 활성화되면 강체 모드는 적용되지 않는 스위치 On/Off 관계로 이해 할 수 있습니다.
추가된 질량과 관성 그리고 중력이 적용되는 중앙부는 센서가 활성화 됐을 때 무시되어지며. 기본적으로 중력 중앙부는 slave node의 질량(ICoG가 2일 경우)을 고려해서 계산됩니다. master node는 질량과 관성이 추가된 중력의 센터를 계산하여 이동하게 됩니다. 질량을 더미에 고르게 분배하기 위해서 /ADMAS 옵션을 적용했습니다.
센서에 대한 정보는 아래와 같습니다.
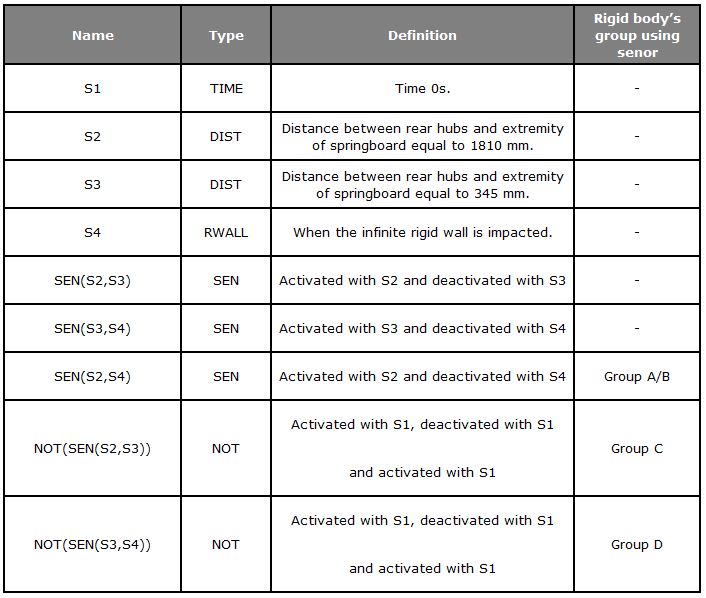
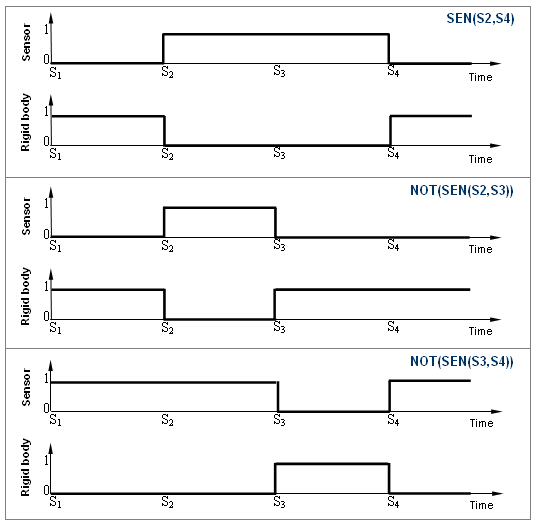
센서 (S4)는 발과 페달사이에 존재하는 빔타입의 스프링들을 비 활성화(Isflag = 1) 시키기 위해서 사용됩니다. 아래 그림에서 센서와 강체 모드의 활성화, 비활성화 영역을 확인하시기 바랍니다.
시뮬레이션 결과와 결론
강체모드에 포함된 요소들은 비활성화 되었으며 Time History를 기록하기로 지정된 요소들을 통해서 시뮬레이션 동안의 강체 모드의 활성화 여부를 확인 할 수 있습니다.
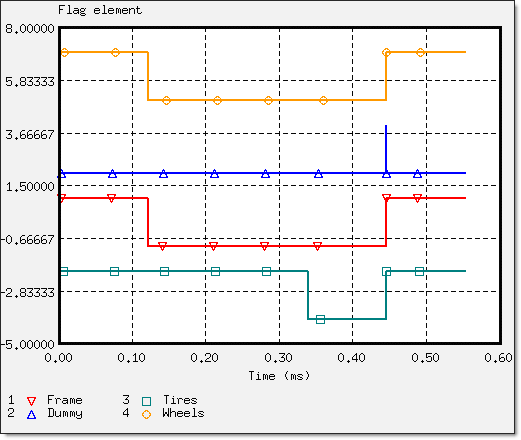
(메인 파트에서의 활성화 여부 – element on/off로 확인)

(준-정적 하중으로 인한 본미세스 응력의 분배)
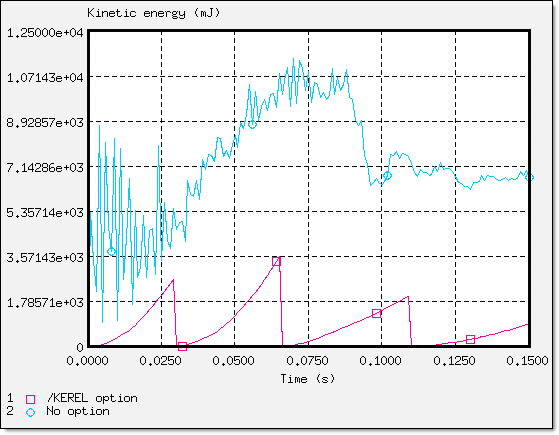
(Kinetic relaxation이 미치는 운동에너지의 영향 – /KEREL)
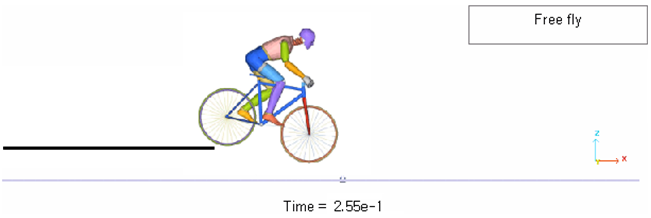
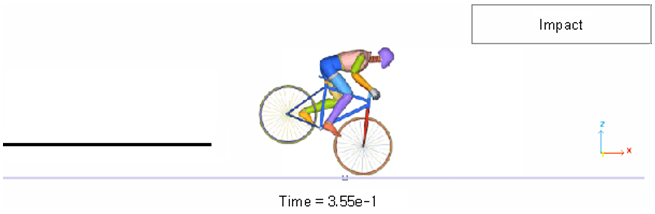
(4단계로 구분한 시뮬레이션)
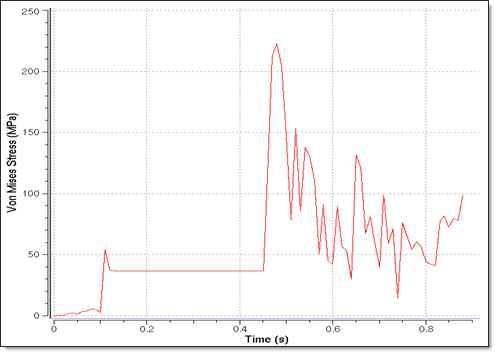
(쉘 요소를 통해서 확인하는 본미세스 응력의 변화)

(해석 결과 애니메이션)
본 예제는 센서와 리스타트 파일을 사용하는 것이 주 목적으로 센서와 리스타트 파일이 어떤식으로 어떻게 사용되는지를 중점으로 확인하는 예제입니다.
내용에 대한 질문은 블로그를 통해 문의하시기 바랍니다.
끝.
공략 13편 – Shock Tube
|
<-- 이전 글 보기
|
다음 글 보기 –>
|