시스템 통합은 개발의 최전선과 후기 개발 단계 모두에서 개발 프로세스의 품질을 개선하고, 기술적 위험을 줄이며, 앞서 언급한 목표를 달성하는 동시에 예전부터 항상 독립적으로 일하던 엔지니어링 그룹 간의 협업을 장려할 수 있습니다. 예를 들면, 일부 하위 시스템은 다른 하위 시스템의 시뮬레이션에서 파생된 정보로 더 좋은 설계를 만들어 낼 수 있고, 전체 시스템에 미치는 영향을 서로 다른 충실도를 가진 모델로 조사할 수 있습니다.
전체적인 시스템 개발 접근 방식의 이점을 살펴보기 위해서 경량 기계 구조, 모션 다이내믹스, e-모터 드라이브 및 컨트롤을 결합한 이륜 스쿠터 예를 다시 살펴보겠습니다. (2017년 이륜 스쿠터 포스팅 다시보기)
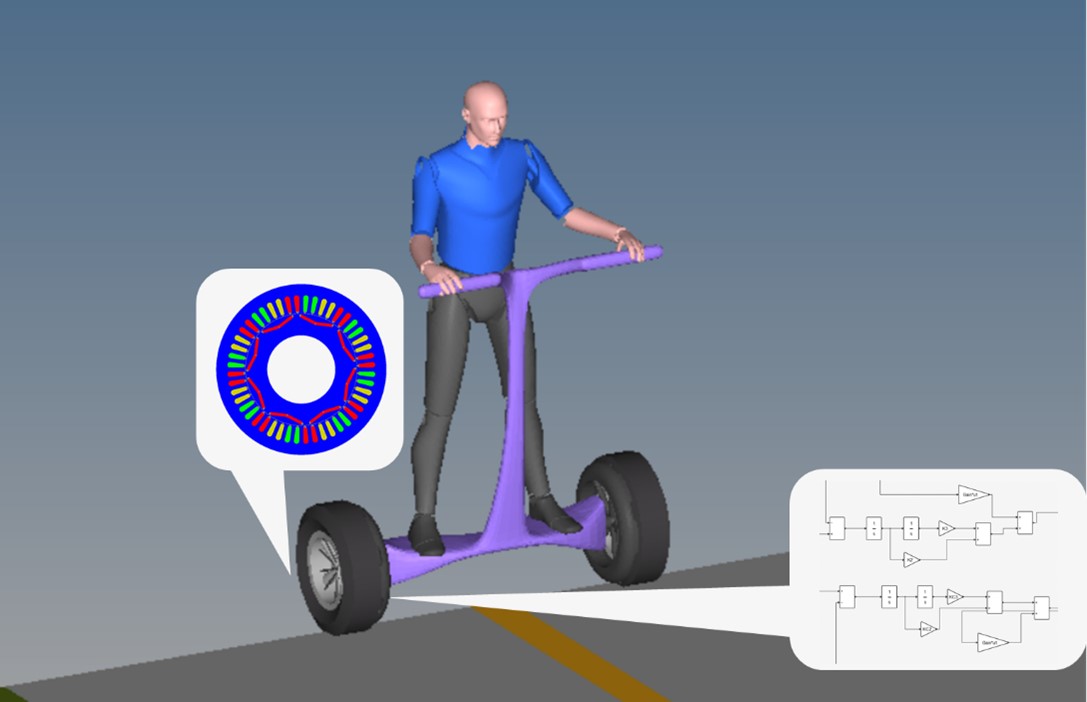
멀티 바디 모델의 인풋은 모터 토크입니다. 모터 토크는 컨트롤러에 의해 구동되는 전류로 전자기 모터 모델에 의해 계산됩니다.
이륜 스쿠터의 하위 시스템 설계는 독립적인 프로세스입니다. 경량화는 효율과 성능을 향상시키는 가장 중요한 요소 중 하나입니다. 기계식 하위 시스템을 모델링하면 모션 다이내믹스를 해석할 수 있지만, 결과 모델은 컨트롤러와 모터 하위 시스템을 모두 설계하는 데에도 도움이 될 수 있습니다.
제어 장치와 모터 설계는 동일한 접근 방식을 따르고 독립적인 프로세스가 될 수 있습니다. 컨트롤러가 개발되는 동안 기계 모델은 단순한 수학적 모델로 축소되고 검증에만 사용됩니다. 그 결과, 조정된 PID(Proportional-Integral-derivative) 컨트롤러가 탄생했습니다. PID 컨트롤러는 여전히 가장 널리 사용되는 제어 방식이지만 컨트롤러에 관련하여 “모든 시스템에 맞는 하나의 크기”는 없습니다. 다중 변수 제어 문제의 경우 PID가 충분하지 않습니다. 또한 매개 변수 조정은 시행착오에 의존하는 시간 소모적인 프로세스입니다.
자동 균형 조절 이륜 스쿠터를 제어하는 것은 다변수 프로세스입니다. 가로 및 세로 평면 모두에 대한 컨트롤이 필요합니다. PID 대신에 최적의 컨트롤러와 같은 다른 제어 방식을 사용해야 합니다. 최적의 컨트롤러를 설계하려면 상태 공간 매트릭스(ABCD 매트릭스) 형태의 기계 하위 시스템의 정확한 ROM(Reduced Order Model)이 필요합니다. 이에 대한 해결책은 Altair MotionSolve™를 사용하여 모델을 선형화 한 다음 필요한 ABCD 매트릭스를 추출하는 것입니다. 이러한 ROM을 통해 Altair Activate®에서 각 평면에 대해 두 개의 최적 컨트롤러를 구축합니다.
마찬가지로 모터 설계는 일반적으로 사일로 그룹의 독립적인 작업입니다. 모터에 대한 요구 사항을 제공하기 위해 초기 개발 단계에서 일부 데이터 교환(크기 또는 토크 프로필 등)이 있습니다. 시스템의 안정성, 성능 및 효율성은 모두 이러한 요구 사항의 품질과 정확성에 의해 영향을 받습니다. 그러나 정확한 요구 조건의 계산은 모터 설계 사일로 그룹을 보증하지 않지만, 다른 두 하위 시스템의 가장 정확한 시뮬레이션에 대한 동기가 됩니다. 보다 정확한 토크 프로파일을 생성하기 위해 컨트롤러 및 기계 하위 시스템의 높은 충실도(Hi-Fi)의 모델을 공동 시뮬레이션에 사용할 수 있습니다. Activate는 다물체 MotionSolve 모델과의 공동 시뮬레이션을 허용하는 통합 플랫폼으로 사용되므로 정확한 제어 기능을 제공합니다. 이 시스템은 매우 정확한 토크 프로파일을 제공하여 시스템 성능, 안정성 및 효율을 향상시킵니다. 그리고나서 명확한 요구 사항을 고려하여 Altair Flux™를 사용하여 모터를 설계했습니다.
총체적인 디자인 탐색
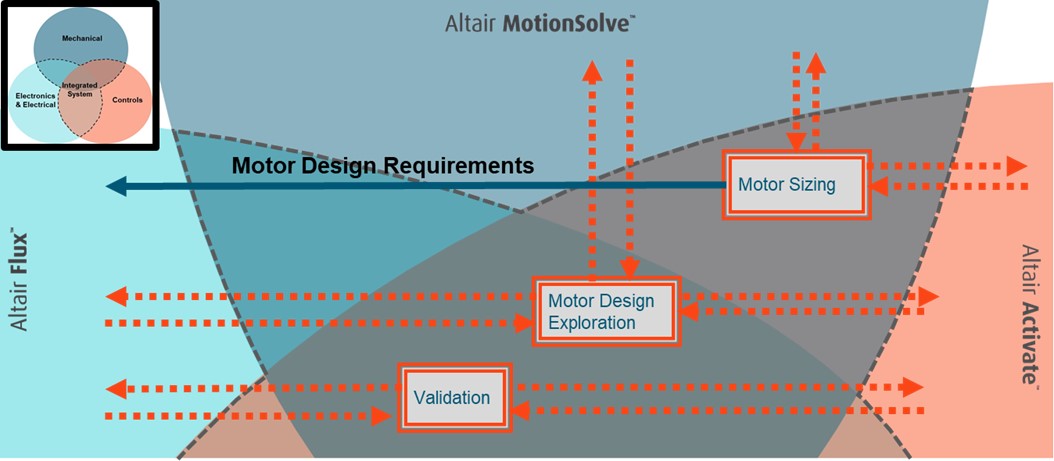
기계, 전기(모터) 및 제어 하위 시스템을 통합하는 것은 모터에 대한 설계 요구 사항을 제공하고,
모터의 설계를 탐색하고, 시스템 성능을 검증하는 데 필요합니다.
각각의 독립적인 하위 시스템이 설계 및 최적화의 과정을 거치는 동안 시스템의 전체적인 모습이 보입니다. 이 때 제품을 개선할 수 있는 다양한 기회를 찾을 수 있습니다. 예를 들어, 모터가 독립적으로 최적화되었지만 우리는 전체 시스템에 미치는 영향을 조사하기 위해 다른 설계를 선택할 수도 있습니다. 각 모터는 서로 다른 주행상태 및 도로에서 테스트되었습니다. a) 평지에서 최대 속도로 출발 및 정지할 때, b) 평지에서 차선 변경 또는 회전할 때, c) 평지에서 오르막길을 주행할 때, d) 거친 도로를 주행할 때.
다중 고속 시뮬레이션의 경우 각 모터 설계에 대한 ROM을 생성하는 것이 좋습니다. 이를 위해 Flux를 사용하여 모터의 동작을 설명하는 정자기 조회 테이블을 만들었습니다. 이로써 훨씬 더 정확한 모터 모델과 빠른 시뮬레이션이 가능하여 전형적이고 단순화된 분석 모델을 제공합니다.
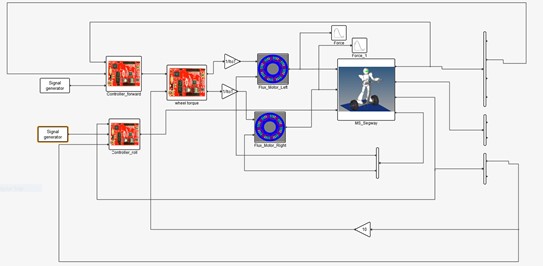
FEA 모터 모델 및 멀티바디 모델과 함께 가로, 세로 평면 컨트롤러를 공동 시뮬레이션하여 보여주는 시스템의 시스템 모델
설계 탐색 중에 시스템 성능을 확인했더라도 최종 시스템을 더 자세히 살펴 보는 것이 좋습니다. 모터 ROM의 사용은 좋은 첫 번째 표지를 제공하지만 더 높은 고조파를 고려한 기계 및 컨트롤러 하위 시스템의 모델과 함께 시뮬레이션 할 때 이를 높은 충실도(Hi-Fi) 모델로 교체하는 것이 중요합니다. 검증 과정에서 모든 하위 시스템은 내장된 MotionSolve 및 Flux 블록기능을 모두 활용하여 Activate와 공동 시뮬레이션하여 시스템의 시스템을 시뮬레이션 했습니다. 검증 프로세스를 통해 시스템은 설계 탐색 단계에서 분명하지 않은 토크 리플로 인해 불안정한 것으로 나타났습니다. 이로 인해 제어 시스템을 약간 수정하였습니다.
전체 시스템에 대한 심층 시뮬레이션이 없었다면 이후 단계에서 불안정성이 발견되어 개발 시간과 비용이 크게 증가했을 것입니다.

시스템 검증(4가지 테스트): 1. 평지에서 최대 속도로 출발 및 정지, 2. 평지에서 오르막길 주행, 3.평지에서 차선 변경 및 회전 4. 거친 도로 주행
본문의 초기에 언급된 문제점 및 목표를 해결하려면 설계 초기 단계에 보다 통합된 개발 프로세스가 필요합니다. Activate를 활용하면 하위 시스템이 연결된 전체적인 시스템 개발 접근 방식은 제품 최적화를 유도하는 동시에 출시 시간을 단축할 수 있습니다. 또한, 각 하위 시스템의 복잡한 유한요소해석(FEA) 시뮬레이션 또는 ROM 시뮬레이션과 공동시뮬레이션 옵션 중 하나를 선택할 수 있어서 설계 탐색 중 신속한 시뮬레이션과 최종 설계의 심층 분석이 가능합니다. 높은 충실도의 모델과 ROM 간의 손쉬운 전환은 개발 시간을 단축하고 보다 효율적이고 협업적인 제품 개발 프로세스를 촉진합니다.
알테어의 통합 시스템 시뮬레이션이 실제로 어떻게 실행되는지 궁금하신가요?

원문은 (여기)에서 보실 수 있습니다.
감사합니다.