구조 최적화와 적층 제조(AM)의 결합으로 여러 기능이 통합되고, 강성이 높고, 무게까지 가벼운 구조를 만들 수 있게 되었습니다. 공간이 제한적이고, 구조적 규정 및 무게가 시스템 성능에 큰 영향을 미치기 때문에 이러한 속성은 경량 로봇에 이상적입니다.
이렇게 프린팅 된 로봇을 만들기 위해서는 재료 과학, 적층 제조 기술 및 구조 최적화를 기반으로 하는 적절한 설계 전략을 세워야 합니다. 하지만 아직까지 3D프린팅 기술로 만든 로봇과 일관된 설계 전략을 가진 사례가 많지 않은 실정입니다.
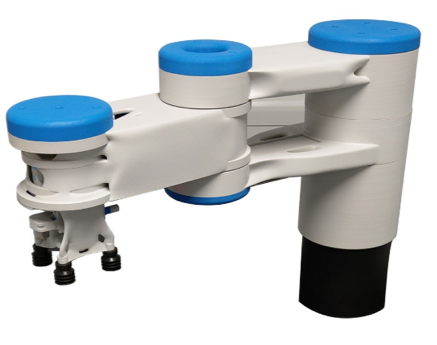
이런 배경적인 이유로, 로봇 암 AM SCARA (Selective Compliance Assembly Robot Arm)의 프로토타입은 여러 분야의 연구 플랫폼으로 개발되었습니다. 이 로봇개발에는 재료 특성화에서 최종 부품의 제조 및 테스트에 이르기까지 필수적인 모든 단계를 포함합니다.
이 프로젝트의 목표는 다가오는 자동화 산업 시대에서, 별개의 분야에 대한 지식을 얻는 것뿐만 아니라 개발프로세스와 관련된 적층 제조법을 개선시키는 것에 있습니다. 이 프로젝트에 적용된 적층 제조 기술로는 엘라스토머 및 열경화성 아크릴레이트(elastomeric and thermosetting acrylates )를 활용한 PolyJet™ 프린팅기법, 열가소성 폴리 아미드(thermoplastic polyamide )로 제작된 선택적 레이저 소결법(SLS) 및 알루미늄 분말로 제작된 선택적 레이저 용융이 있습니다.
이 적층 제조 법에 대한 연구개발은 Festo AG &Co. KG와 요하네스 케플러 대학의 IPPE (Institute of Polymer Product Engineering)이 협력한 프로젝트에서 수행되었습니다. DIMAP연구결과로는 초기연구와 Polyjet기술로 프린팅 된 파트가 있습니다.
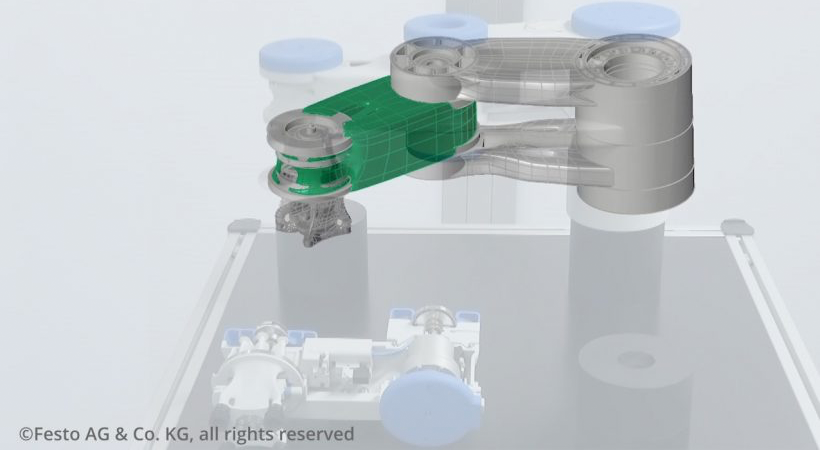
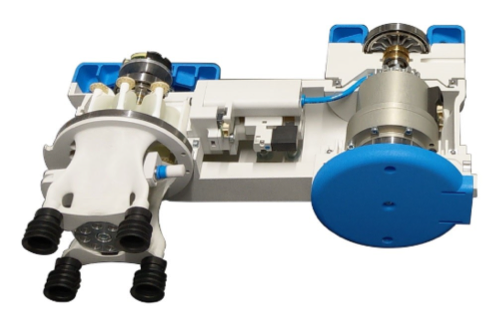
AM SCARA는 공압식 액추에이터로 구동되는 4 자유도계의 메니퓰레이터입니다. 엑츄에이터 토크를 제어하기 위하여, 피에조 벨브와 프린팅 된 공기 채널 조합은 로봇 링크에 연결되어 있습니다. 여기서 링크는 선택적 레이저 소결에 의해 제조되었으며 알테어 소프트웨어 솔루션을 사용한 시뮬레이션 기발설계 방식에 따라 설계되었습니다.
하나의 기술적 예로는 crips에서 PolyJet ™기술을 사용하여 전체 파트를 프린팅한 elastomeric rotary drive와 통합된 다중 재료 그리퍼(multi-material gripper)가 있습니다. 여기서 진공 노즐을 그리퍼에 연결하고, 프린팅 된 공기 채널을 4개의 흡입 컵에 연결했습니다. 이 로봇은 400mm까지 뻗을 수 있고 1kg이상의 페이로드를 들어 올릴 수 있습니다.
기계학 개발센터에서의 구조 최적화
AM SCARA는 당시에 비슷한 시스템이 없었기 때문에 처음부터 설계되었습니다. 개념 스케치에서는 동역학, 조립 단계 순서 및 피에조 밸브 모듈 및 전자 장치와 같은 메카트로닉 서브 시스템의 치수를 고려했습니다. 이 개념은 CAD (Computer-Aided Design) 모델로 변환되었으며 디자인 공간의 정의와 구조적 동작에 영향을 주는 모든 디자인 기능이 보완되었습니다.
로봇 암 형상은 Altair Inspire ™로, 그리퍼는 Altair HyperMesh ™로 가져온 후 유한 요소 분석 (FEA)을 최적화의 기준으로 실행했습니다. 일반적인 집어서 자리를 옮기는 과정의(Pick and place Application) 하중을 나타내면서, 여러 하중 사례가 정의되었습니다. 또한, IPPE에서 SLS 및 PolyJet ™등과 같은 구조재료에 대한 광범위한 테스트를 수행하였습니다. 여기에는 온도와 변형률의 변화에 따른 단조 인장 시험과 다양한 수준의 응력 및 변위에서의 크리프 및 이완 시험이 포함됩니다.
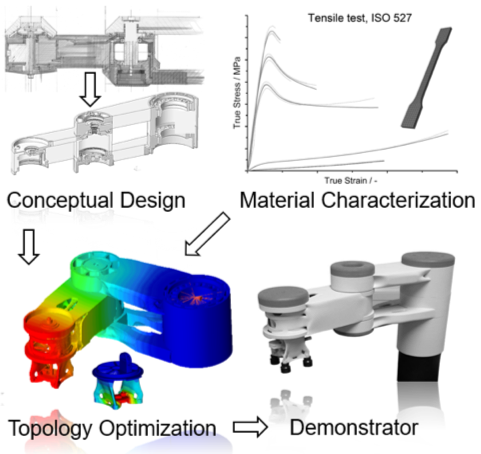
결과를 바탕으로 재료 모델을 보정하고 재료의 적용 한계를 결정했습니다. 토폴로지 최적화 문제의 공식화에는 구조의 최소 가중치 준수, 대칭 제약 조건 및 디자인 공간에서 허용 가능한 체적 비율의 목표가 포함되어 있습니다. PolyJet ™ 및 SLS 프로세스에서 층별 빌드 업 구조와 쉽게 제거 가능한 서포트 재료를 사용하여, 제조 관련 제약이 없앴습니다.
Altair Inspire에서 최적화 시켰고, 그리퍼(Gripper)는 Altair HyperMesh, Altair OptiStruct 및 Altair HyperView를 사용하여 최적화 하였습니다. 각 도구는 전 처리, 솔빙/최적화 및 결과 후 처리를 포함한 프로세스에서 중요한 역할을 수행합니다. 완전 등방성 및 선형 탄성 재료 모델은 작은 변형률(Strain)에 대한 재료 특성화 결과에 따른, 기초 FEA 하중 케이스에 사용됩니다.
Altair Inspire의 PolyNubs 기능을 사용하여 최적화된 구조를 리모델링 하였습니다. 또한, PloyNubs 형상의 재분석을 수행하고 최대 변형률에 대한 구조해석을 수행하였습니다. 설계를 마무리하기 위해 형상을 CAD 파일로 다시 가져오고 부품을 실제 구조로 만들기 전에 프린팅된 가닥을 포함한 최종 상세정보를 추가했습니다.
현재 응용 분야 및 향후 연구
이 프로젝트의 과제는 전체적으로 적층 제조된 파트를 조립하여 만든, 공압식 엑츄에이터 방식을 사용한 로봇을 구현하는 것이었습니다. 이 목표에 도달하면서, 공압식 경량 로봇의 어떤 구성 요소가 적층 제조를 위해 고려되어야 하며, 어떤 추가 연구가 필요한지에 대한 명확한 그림이 보여지고 있습니다. 이 프로젝트에서 얻은 경험과 데이터를 통해 공압-메카트로닉 시스템의 초기 단계 테스트를 위한 기능적 프로토타입을 구축할 수 있습니다.
앞으로의 연구 프로젝트는 구조적 경량 부품 및 기하학적으로 복잡한 밸브 모듈의 제조를 위한 다양한 적층법 및 기존 기술의 비교를 다룰 것입니다. 미래에는 시뮬레이션 중심 설계 프레임워크를 통해 “맞춤형 로봇”을 개발할 수 있을 것입니다. 이런 새로운 적층 제조 로봇에서는, 경량 구조 및 작동 시스템이 각 고객 응용 분야에 맞게 특화되어 설계될 것입니다.
원문은 (여기)에서 확인하실 수 있습니다.


