본 예제에서는 제품 성형 후에 발생하는 스프링백에 대해서 알아봅니다. 이번 예제에서 사용하는 모델은 Numisheet93에서 진행한 유명한 시험 중 하나입니다. 스프링백 해석은 일반적으로 준정적 하중 풀림이 적용되며 RADIOSS implicit 코드를 이용해서 해석을 진행합니다. 또한 RADIOSS explicit 솔버도 해석의 효율성을 비교하기 위해서 해석을 진행합니다.
단, 스프링백이 발생하기 전 성형해석은 대변형 문제이기 때문에 오직 explicit 솔버만 사용합니다.
요약하자면 이번 예제의 목적은 스프링백 시뮬레이션에서 implicit 솔버의 효율성을 확인하는 것입니다.
예제의 목적
이번 예제는 스프링백을 포함한 스탬핑 프로세스를 수치 해석적으로 다루고 있습니다. 이는 시트 메탈 성형 테스트 중 하나인 “2D Draw Bending”을 다루고 있습니다. 스프링백 시뮬레이션이 진행되는 동안 explicit to implicit 해석 방법이 사용됩니다. 먼저 동적 성형 과정은 explicit 솔버를 이용하고 이어서 스프링백에 의한 점진적인 변형은 implicit 솔버로 계산됩니다.
다음 2가지 방법이 해석의 정확도를 비교하기 위해 수행됩니다.
– Explicit 스탬핑 후 Implicit 스프링백
– Explicit 스탬핑 후 Explicit 스프링백 (Dynamic relaxation 사용)
스프링백 시뮬레이션은 탄소성 비선형으로 접근해야합니다. Implicit 인풋 옵션과 incremental 해석 방법은 모델링 세션에서 언급하겠습니다.
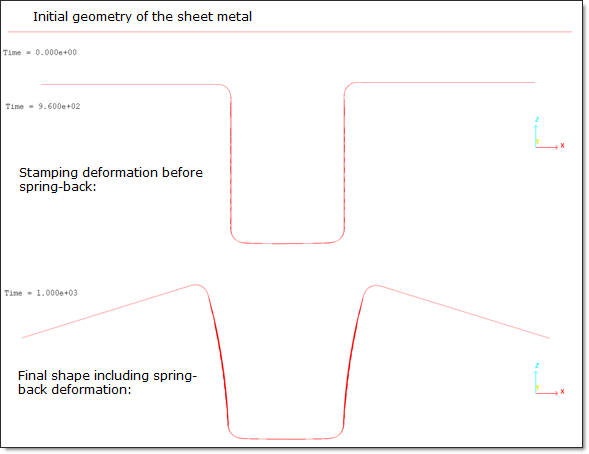
스탬핑의 수치해석적인 시뮬레이션은 시간이 960ms까지 수행되며, 스프링백 계산은 960ms에서 1000ms 사이에 진행되며 이때는 implicit로 계산됩니다. 그리고 explict로 계산 할 때는 6000ms까지 진행되며 이는 준정적 해석으로 고려합니다.
물리적 문제 정의
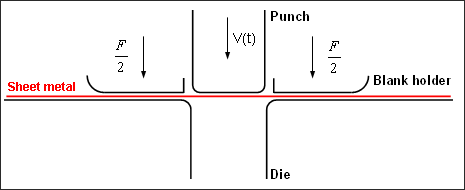
일반적으로 스탬핑에 사용되는 장비로는 펀치, 다이, 블랭크 홀더가 있습니다.
단위 : mm, ms, g, N, MPa
블랭크 홀더에 수직 하중 1225N이 적용되며 이는 블랭크가 빠져나가지 않도록 하기 위해 고정시켜주는 힘입니다. 물론 스프링백 해석 전에 이 하중은 제거됩니다.
시트 메탈 스탬핑 과정은 다양한 강제속도를 펀치에 부여하는 것으로 진행됩니다. 제품 성형에 사용되는 도구들은 스탬핑 과정이 끝나면 모두 제거되고 본격적으로 스프링백 해석이 진행됩니다.
장비들에 대한 자세한 정보는 다음과 같습니다.
- Radius of die’s corners: 5 mm
- Radius of punch’s corners: 5 mm
- Width of punch: 50.4 mm
- Sheet metal dimensions: 35 mm x 175 mm
시트 메탈의 두께는 0.74mm로 설정되며 시트 메탈과 다이 사이에서 발생하는 마찰계수는 쿨럼 마찰로 0.129가 적용됩니다.
스탬핑 도구들은 선형 탄성 모델로 아래와 같은 값을 갖고 있습니다.
- Initial density: 8×10-3 g/mm3
- Young modulus: 206000 MPa
- Poisson ratio: 0.3
시트 메탈의 재료는 이방성의 특성을 갖고 있으며, 이방 탄소성 거동을 묘사하기 위해 /MAT/LAW43 물성이 사용됩니다. 이는 이방성 항복 거동에 대한 일반화된 본미세스 기준을 고려하기 위한 용도입니다.
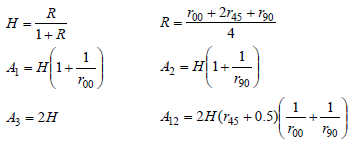
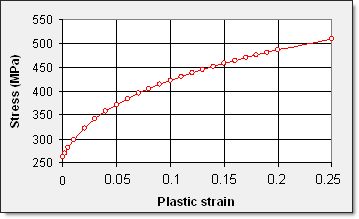
항복 응력은 사용자가 정의한 커브에 따라서 정의되며 아래와 같은 공식에서 얻어진 응력과 비교됩니다.
![]()
여기서 Ai는 Lankford’s 이방성 파라미터의 범위를 사용하여 계산됩니다. Lankford 파라미터에 대한 각도는 직교 방향 1에 따라서 정의됩니다.
hardening coefficient는 하드닝 모델을 완전 등방성 모델로 묘사하기 위해서 사용됩니다. (값을 0으로 설정) 또는 Prager-Ziegler kinematic 모델을 베이스로 한 것을 묘사하기 위해 사용됩니다. (값을 1로 설정).
만약 이 값이 0과 1사이의 값이라면 하드닝은 모델 사이에서 보간 될 수 있습니다.
- Initial density: 8×10-3 g/mm3
- Young modulus: 206000 MPa
- Poisson ratio: 0.3
- Lankford 0 degrees: r00= 1.73
- Lankford 45 degrees: r45 = 1.34
- Lankford 90 degrees: r90= 2.24
항복에 대한 선도는 다음과 같으며 여기서 파손은 고려하지 않습니다.
해석, 가정 그리고 모델링 묘사
모델링 기법
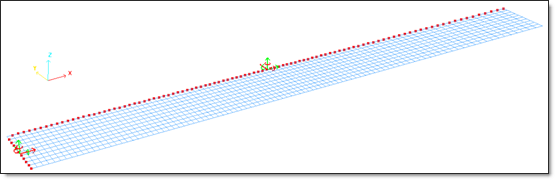
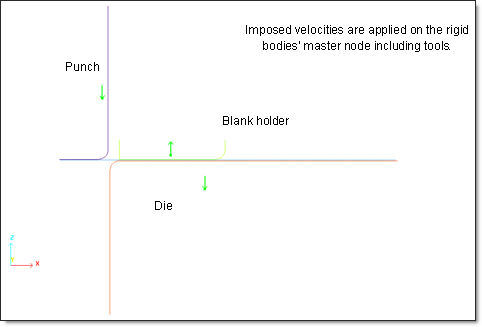
대칭을 고려했을 때 전체 모델중 1/4 모델만 사용됩니다. 대칭 되는 평면은 y = 17.5mm , x = 0 mm입니다.
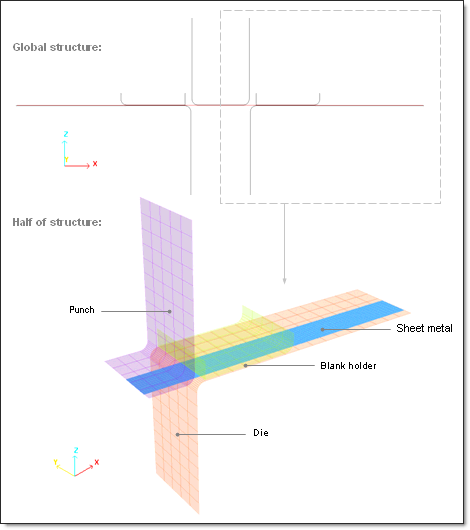
그림에 보이는 것처럼 펀치는 보라색이며 블랭크 홀더는 녹색 그리고 다이는 빨간색입니다. 여기서 파란색은 시트메탈이며 4-node shell 요소로 구성되어있습니다.
시트 메탈은 사이즈가 균일하지 않은 4각형 요소로 되어있으며 소성적으로 변형이 발생됩니다. 여기서 가장 작은 요소의 크기는 1.5mm입니다.

정확한 시뮬레이션 결과를 얻기 위해서, QEPH 요소 계산 방식이 적용되며 이는 implicit, explicit 전부 사용됩니다. 그리고 라그랑지안 해석 방법이 적용됩니다.
탄소성 힐 물성이 적용된 모델은 직교 프로퍼티가 사용된 Shell 요소로 구성되어 있습니다. 이 요소에 대한 특성은 다음과 같습니다.
- 5개의 적분점
- Three Newton iteration과 함께 상호작용하는 소성성 (Iplas = 1)
- 응력 계산에서 두께의 변화를 고려 (Ithick = 1)
- 초기 두께 : 0.74mm
- 직교 각도 : 0도
- 참조 벡터 : 1, 0, 0
참조 벡터의 인풋 컴포넌트는 직교 시스템의 로컬 좌표 (방향1)를 정의하기 위해 사용됩니다. 직교 각도 는 직교 방향1과 참조벡터의 프로젝션 사이에서 정의됩니다.
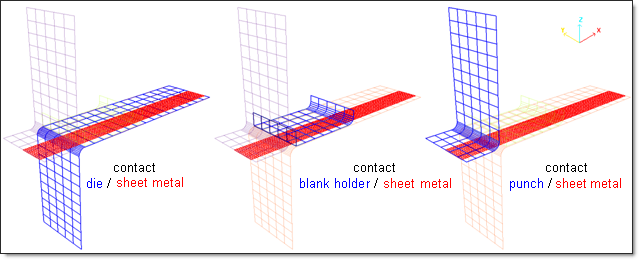
인터페이스 7을 이용하여 3개의 컨택을 생성합니다. 이에 대해 상세 값은 다음과 같습니다.
- 쿨럼 마찰 : 0.129
- 컨택 갭 : 0.37
- 크리티컬 댐핑 강성 : 1
- 크리티컬 댐핑 마찰 : 1 (디폴트)
implicit 접근에서 컨택은 여러개로 분리된 강성 매트릭스 중 메인에 담겨있습니다. 이는 추가적인 메모리가 필요하며 두번째 컨택 강성에 대한 정보는 컨택이 활성화 됐을때만 표시됩니다.
크리티컬 댐핑 값 묘사 :
- 수직 하중에 대한 계산 :
![]() 에서 Ks와 C 값은 다음 식으로부터 계산됩니다.
에서 Ks와 C 값은 다음 식으로부터 계산됩니다.
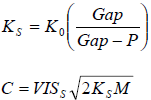
K0는 초기 컨택에서의 스프링 강성입니다.
VISCs는 인터페이스 강성에서의 크리티컬 댐핑 값입니다. (기본 값 0.05)
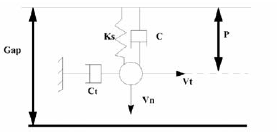
인접 하중 계산은 다음과 같습니다.
Ft = min(Fric * Fn, Fad ) 에서
Fad = CtVt는 adhesion 하중입니다.
![]()
VISf는 인터페이스 마찰에서 크리티컬 댐핑 값입니다. (기본 값 1)
Implicit 솔버에서의 스프링백 해석은 스탬핑 과정에서 사용된 다른 파트들을 제거해야 하며 이는 *_0002.rad를 통해서 적용됩니다.
/DEL/INTER
1 2 3 Interfaces ID 1, 2 and 3 are deleted.
RADIOSS Option Used
시뮬레이션은 다음과 같은 과정으로 진행됩니다.
1. 해석 시작부터 960ms까지 스탬핑 시뮬레이션
2. 스프링백 시뮬레이션 :
- explicit : 960ms 에서 6000ms까지
960ms에서 2000ms : 스프링백 해석이 진행되는 동안 동적 영향을 최소화해야 하기 때문에 준정적 해석으로 적용하기 위해 스탬핑 툴은 점차적으로 제거됩니다. 이처럼 인터페이스는 제거되지 않지만 별도의 옵션이 *_0002.rad에 적용됩니다.
2000ms에서 6000ms : 동적 완화 (/DYREL)이 *_0003.rad 엔진 파일에서 활성화됩니다. 이는 준정적 평형을 향한 수렴을 위해 적용합니다.
- implicit 접근 : 960ms 에서 1000ms까지
implicit 옵션이 *_0002.rad 파일에 적용되며, 응력 완화는 /IMPL/SPRZBACK 키워드로부터 적용됩니다. 모든 인터페이스 들은 제거되며 특정 경계조건이 추가되게 됩니다. 또한 스탬핑에 사용된 도구들은 제거되지 않습니다.
시뮬레이션에서 스탬핑 툴들은 아래 그림과 같이 Rigid body로 연결됩니다. (RBODY)
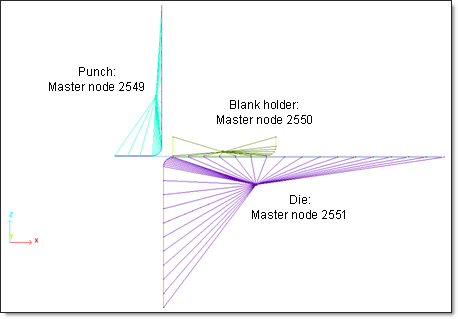
마스터 절점은 자동적으로 설정되고 무게중심이 계산됩니다. 해당 RBODY에서 ICoG 값을 1로 설정하면 마스터 절점은 해당 부분의 질량과 관성, 무게중심의 위치로 이동합니다.
질량과 관성이 RBODY에 추가되진 않습니다.
대칭을 고려하기 위해 1/4 모델만 적용되었는데 Implicit 계산에서 발생하는 강체모드와 모델의 크기를 제한하기 위해서 사용되었습니다.
대칭면은 Y축이 0인 곳을 따라서 정의됩니다.
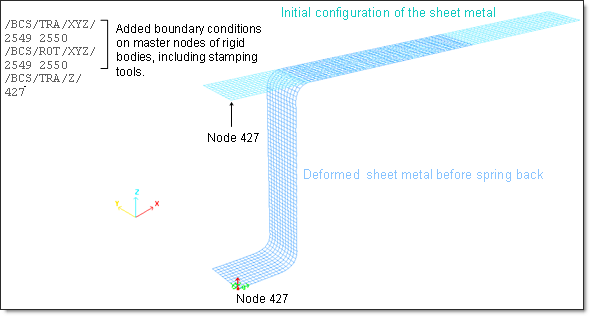
축방향으로의 절점들은 Y축 병진방향 X, Z축 회전 방향으로 구속됩니다.
대칭 조건을 위한 절점들은 X축 병진방향 Y, Z 축 회전 방향이 구속됩니다.
다이와 블랭크 홀더는 Z축을 따라서 강제적으로 이동하게되며, 이들에 대한 강제속도는 다이와 블랭크홀더에 생성된 RBODY의 마스터 절점에 적용됩니다.
Implicit 스프링백의 수치해석에 대해서 implicit 해석이 적용 될 수 없는 강체모드를 제거하기 위해서 추가적인 조건이 추가되야하며 이는 *_0002.rad 엔진 파일에 기록됩니다.
427번 절점을 제외한 모든 스탬핑에 사용되는 파트들은 완전구속된 상태이며, 427번 절점은 Z축을 따라서 이동하여 강체모드가 발생 없이 블랭크가 변형 될 수 있도록 해줍니다.
펀치의 속도는 입력된 하중 커브를 따라서 작동하며, 해당 커브는 아래 그림과 같습니다.
implicit 스프링백 해석이 진행되는 동안에 모든 속도는 0으로 설정됩니다.
Explicit 스프링백 계산은 6000ms의 시간까지 적용되며 이를 위해 강제속도는 1000ms에서부터 제거됩니다.
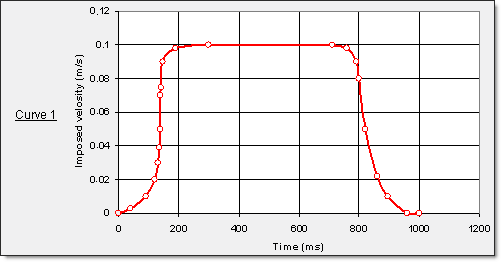
- 펀치 – 커브 1, 스케일 -1
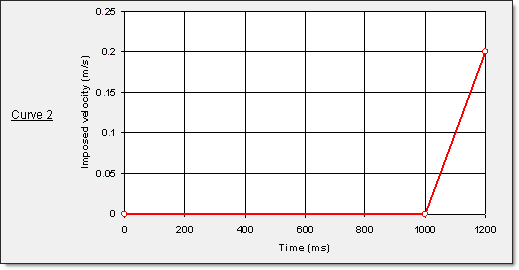
- 다이 – 커브 2, 스케일 1
- 블랭크홀더 – 커브2, 스케일 -1
explicit 솔버로 성형해석이 960ms까지 진행됩니다. implicit 해석은 960ms에서 1000ms까지 진행됩니다.
대칭조건을 고려할 때, 일정한 집중하중 612.5N이 블랭크 홀더에 생성된 RBODY의 마스터 절점에 적용됩니다.
이 하중은 스프링백 해석이 진행되기 전인 960ms에서부터 0으로 설정되여 더 이상 작동하지 않게됩니다.
Implicit 스프링백 해석을 위해 /IMPL/SPRBACK 키워드가 입력되야 합니다.
비선형 implicit 해석을 위한 값들은 다음과 같습니다.
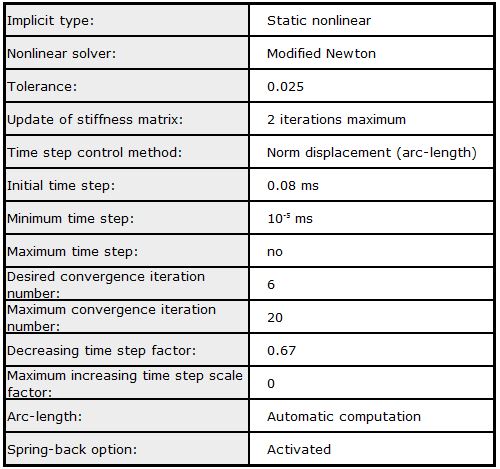
Implicit 비선형 해석에서는 Ax=b 방정식을 풀기 위한 솔빙 방법의 설정이 필요하며, 이는 /IMPL/SOLVER에서 설정합니다.
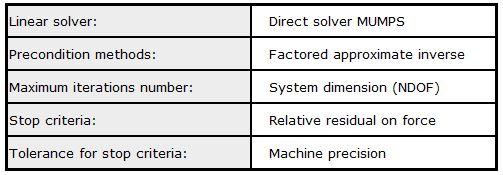
이에 대한 인풋은 다음과 같으며 *_0002.rad 파일에 입력되어 있습니다.:
/IMPL/PRINT/NONL/-1
Printout frequency for nonlinear iteration
/IMPL/NONLIN/1
2 0 0.25e-1
Static nonlinear computation
/IMPL/SOLVER/2
5 0 3 0.0
Solver method (solve Ax=b)
/IMPL/DTINI
0.08
Initial time step determines initial loading increment
/IMPL/DT/STOP
0.1e-4 0.0
Min-Max values for time step
/IMPL/DT/2
6 .0 20 0.67 0.0
Time step control method 2 – Arc-length+Line-search will be used
to accelerate and control convergence
/IMPL/SPRBACK
Spring-back computation (stress relaxation)
Explicit 스프링백 해석은 dynamic relaxation을 사용하며 이는 *_0003.rad 파일에 적용되어 있습니다. explicit 시간 적분 방식은 노드의 가속 계산과 함께 시작되며 이러한 방식은 동적 하중을 계산하는데 효율적입니다.
하지만 동적 해석방식을 통한 준정적 시뮬레이션에서는 정적 평형상태를 수렴시키기 위해서 동적 영향을 최소화 시킬 필요가 있습니다.
동적 영향은 아래와 같은 댐핑 매트릭스를 따라서 댐핑되게됩니다.
![]()
![]()
여기서 B(베타)는 relaxation 값이며 이는 기본적으로 디폴트 값인 1로 설정되는 것을 추천합니다. 그리고 T는 댐핑이 적용되는 간격입니다.
이들의 값은 본 모델에서 B = 1, T = 1000으로 설정됩니다. 키워드는 /DYREL 입니다.
시뮬레이션 결과 및 결론
성형해석에서는 비선형성이 강한 과정을 진행하면서 일부 소성변형된 영역과 많은 양의 탄성변형률 에너지가 발생하곤 합니다. 스탬핑 과정동안에 시트 메탈에 축적된 내부에너지는 스탬핑압이 제거되면서 방출되게되는데. 이 에너지 방출이 재료의 변형을 일으키게 되며 이를 스프링백이라고 합니다. 시트 메탈 포밍에서 스프링백 변형은 파트내에 축적된 탄성에너지의 발산으로 재료가 소성 변형 후에 탄성 회복이 되어 예상한 형상과 다를 수 있어 매우 중요한 포인트로 여겨지게됩니다.
explicit 해석에서 빠른 해석 시간을 위해 물성의 밀도 값을 10,000배 향상시켰습니다.
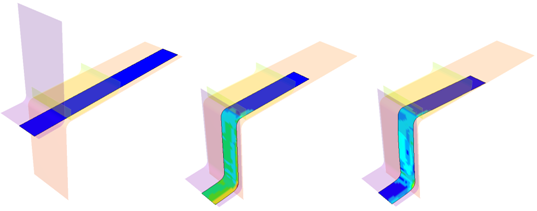
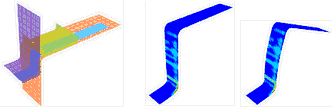
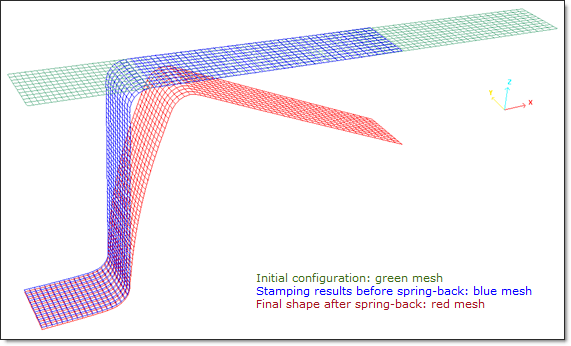
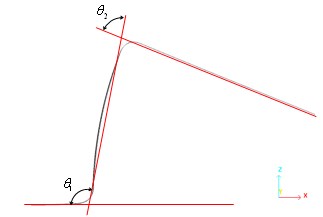
아래 그림은 implicit 해석을 통해 스프링백 형상을 보여주고 있으며, 대칭이 적용된 모델입니다.
아래 그림을 보면 녹색 메쉬는 초기 형상이며 스프링 백이 진행되기 전에는 파란색 메쉬 그리고 스프링 백이 적용된 상태는 빨간색 메쉬입니다.
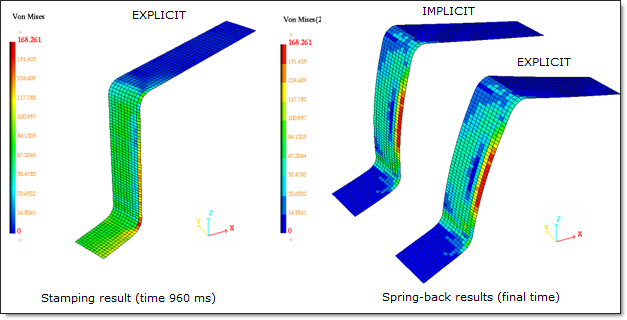
스프링백 해석에 대한 애니메이션 결과는 다음과 같으며 응력이 점차적으로 증가하는 것을 볼 수 있습니다. 이후에 응력이 감소하는 경향을 보이며 이 부분이 내부에너지가 방출되면서 스프링백되는 과정입니다.
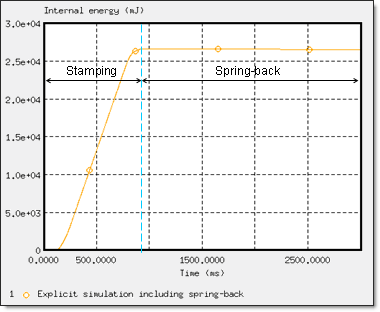
다음 그림은 스탬핑이 진행되는 동안 시트 메탈에 축적되는 내부에너지를 보여주고 있습니다.
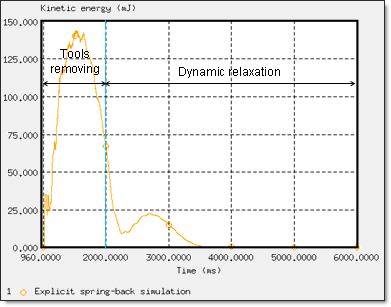
Explicit 스프링백 계산을 위해 적용된 동적 완화를 통해서 준정적 해석을 수렴 할 수 있게 합니다.
다음 그림은 시트 메탈의 운동에너지 변화를 보여주고 있습니다. 동적 완화에 의해 운동에너지를 완화시키게 됩니다.
다음 표는 실험 결과와 해석 결과를 비교하고 있습니다.
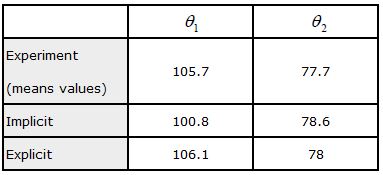
(실험과 해석의 결과 비교)

(implicit / explicit 계산 시간 비교)
결과에 대해 정리하자면 Explicit와 Implicit 해석 모두 좋은 결과를 얻었습니다. 하지만 해석 시간에 대해서는 implicit가 explicit 대비하여 40% 나은 효율을 보여주고 있습니다. 따라서 스프링백 해석에서는 Explicit 솔버 보다는 Implicit 솔버를 사용하는 것이 좀 더 경제적임을 확인 할 수 있습니다.
성형해석에 보다 쉽게 접근하길 원하신다면 HyperForm을 추천드립니다.
위에 대한 내용을 사용자가 쉽게 모델링 할 수 있는 HyperWorks 제품군 중 하나입니다.
끝
RADIOSS 공략 26편 – Rupture Plate
|
<-- 이전 글 보기
|
다음 글 보기 –>
|