목적
본 예제의 목적은 interface 16, 17번을 이용하여 Node-Surface 컨택, Surface-Surface 컨택을 알아보는 것입니다. 기어 예제를 이용하여 이를 알아 볼 것이며 기어 모델에는 SHELL16 요소와 BRICK20을 사용하여 모델링 되었습니다. 먼저 teeth 사이의 컨택을 16번으로 적용해보고 그 후 면과 면을 17번 컨택을 적용하도록 하겠습니다.
물리적 문제 묘사
기어의 시스템은 일정한 가속도로 회전하게 됩니다. (감마는 0.002rad/ms2) 가속도는 양쪽 기어 모두에 적용되었습니다. 양측 기어의 teeth 부분에는 어떠한 마찰력도 발생하지 않는다는 가정하에 진행됩니다.
물성 및 모델 정보
단위 : mm, s, ton, N, MPa
기어에 적용된 스틸 물성은 다음과 같습니다.
탄성 /MAT/LAW2 적용
- Young’s modulus: 210000 MPa
- Poisson’s ratio: 0.29
- Density: 7.8×10-9 Kg/l
- Number of teeth : Z = 19
- Diametric pitch : P = 1/mo = 1/40
- Pressure angle : ao = 20 degrees
다음 파라미터들은 아래와 같이 계산됩니다.
- Pitch diameter : Dp = mo *Z, then Dp = 760mm
- Root diameter : Db = mo * cos(ao), then Db = 714.17mm
- Addendum : ha = mo, then ha = 40mm
- Dedendum : hf = 1.25 * mo, then hf = 50mm
- Circular pitch : p = PI *mo, then p = 125.66mm
모델링 방법
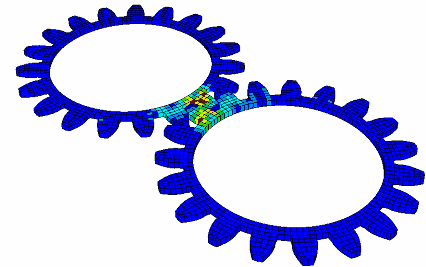
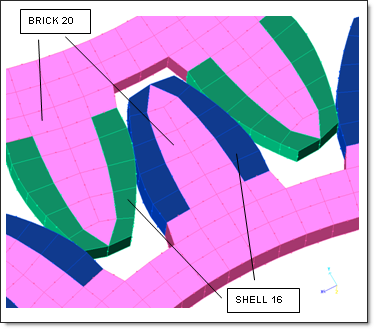
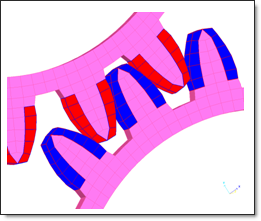
기어에 사용되는 요소들은 SHELL16과 BRICK20이 있으며 이는 각각 쉘과 솔리드 요소입니다. 솔리드 요소는 기어의 teeth 부분의 곡률을 고려하기 위해서 사용됐으며 외부의 RICK20 요소들은 솔리드에서 SHELL16 쉘 요소로 전처리 작업에서 변환합니다. 컨택 16과 17번은 이러한 SHELL16 쉘요소들 사이의 면을 관리하고자 사용되었습니다.
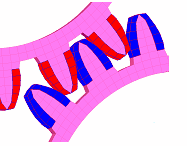
컨택 16과 17번은 라그랑지안 멀티플라이어가 사용됐으며 컨택 타입 16번은 quadratic 마스터 면을 충격하는 slave 절점 그룹들로 만들어졌습니다. 컨택 타입 17번은 두개의 quadratic 면들로 만들어졌습니다.
Tip. 라그랑지안 멀티플라이어란?
일반적인 컨택 계산 방법인 패널티 방법과는 대조적으로 라그랑지안 멀티플라이어 방법은 순수하게 수학적으로 계산되고 모델의 컨택에 적용되는 물리적 요소인 스프링이 필요하지 않습니다. 비선형 시스템의 방정식은 컨택조건을 고려해서 해를 구하게 되는데 이와 같이 높은 인터페이스 강성으로 인한 타임스텝의 충돌이 발생하지 않습니다. 그러나 많은 CPU 사용량이 필요합니다. 이러한 방법의 이점은 컨택 면에서의 slave 절점을 멈추는 것이지만 (컨택 조건을 간단하게 만족시키는) 마찰을 계산 할 수 없다는 단점이 있습니다.
RADIOSS 옵션 사용
0.002rad/ms2의 강제 회전 가속도가 기어에 적용되었습니다.
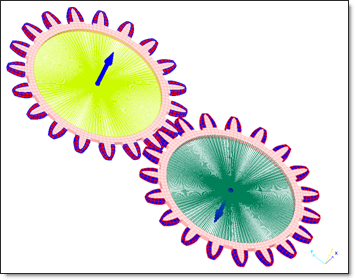
초기 회전 가속도를 기어들에 적용하기 위해서 두개의 강체가 아래 그림과 같이 생성되었습니다. 이때 양측 강체는 첫 하중 후의 파트의 현실적인 변형을 고려하기 위해서 강체모드를 풀어줍니다. 강체의 바깥 평면의 회전 구속은 풀어둔 상태이며, YZ 대칭면이 모델을 안정화하기 위해 사용되었습니다.
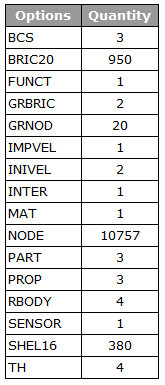
(사용된 옵션의 개수)
시뮬레이션 및 결과
Time History
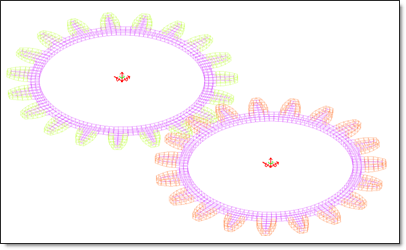
아래 그림에서 기어의 속도가 적용된 것을 볼 수 있습니다.
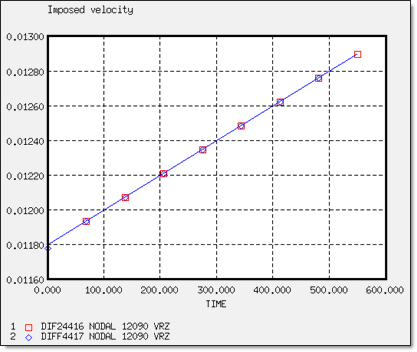
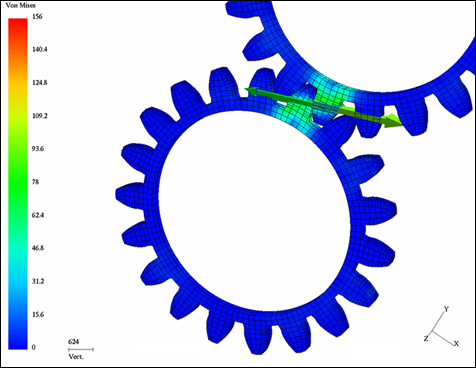
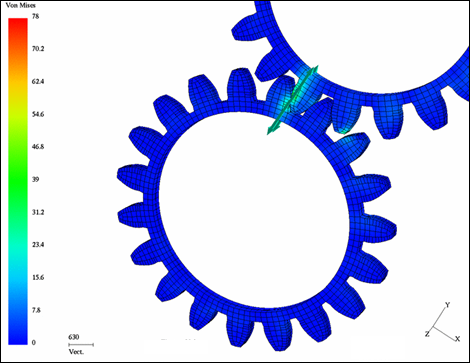
위 그림은 각각의 다른 모델로부터 얻어진 컨택 포스를 비교하는 것입니다. 각각 컨택 타입 16과 17이 적용되었습니다. 타입 17번이 적용된 모델에서 수치적인 문제가 발생하는 것을 비교에서 보여주며 이는 알고리즘의복잡성 때문에 발생했습니다. 특히 비선형형적인 곡률이 존재하는 두개의 면을 적용한 것에서 발생합니다.
결론
컨택 면이 복잡하거나 갭이 없음에도 타입 16번은 전체적으로 만족스러운 결과를 보여주고 있습니다.
끝.
공략 16편 – 16 – Dummy Positioning
|
<-- 이전 글 보기
|
다음 글 보기 –>
|